Warum sollte man sich für Dinge abmühen, die der Computer viel besser kann als man selbst?
Dieser Gedanke rückt viel zu oft in den Hintergrund. Auch wenn ich mich selbst immer wieder dabei erwische, Dinge manuell zu machen (weil man es halt doch nicht so oft braucht), poppt immer wieder folgender Gedanke hoch:
Wenn man einmal 2 Stunden für die Automatisierung einer 10-minütigen Aufgabe investiert, hat es sich nach 12-maliger Benutzung schon gelohnt. Mal ganz zu Schweigen von Flüchtigkeitsfehlern, Wiederholbarkeit, etc.
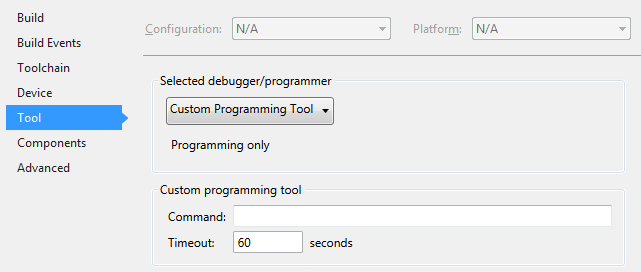
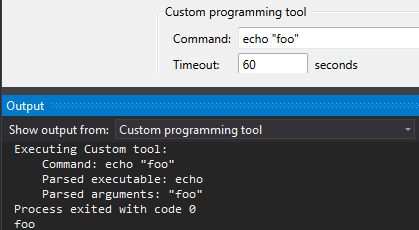
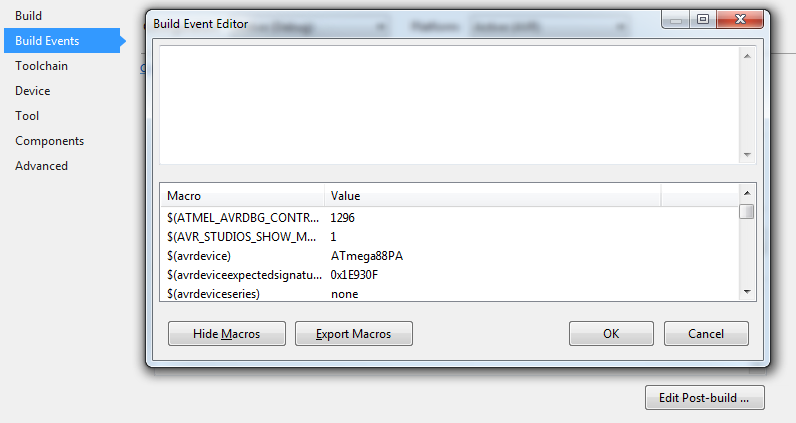
Mir war schon länger bekannt, dass Microchip Studio Definitionsdateien für Register mitbringt, das erste Mal aktiv genutzt habe ich sie beim updizombi (den ich im Nachhinein lieber updipuppeteer genannt hätte, weniger apokalyptisch), auf dessen Hilfsscript ein Tool entstand, das viel Fleißarbeit abnimmt:
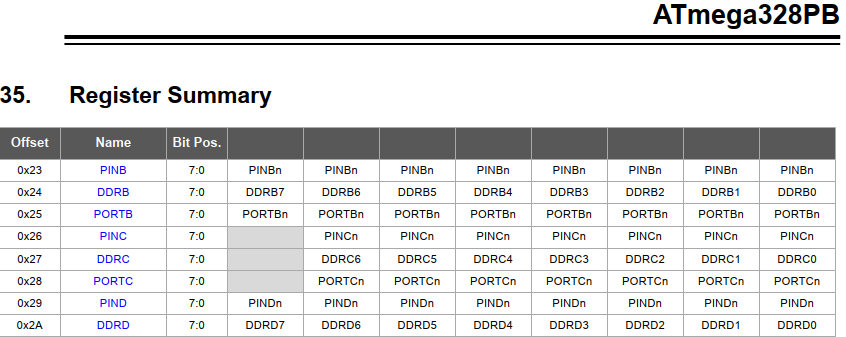
Für die bessere Lesbar- und Wartbarkeit beim Schreiben von Registern habe ich mir angewöhnt, die Namensdefinitionen der Bits zu nutzen. Dafür liegt dann mindestens die Register Summary des Chips auf dem zweiten Bildschirm:
Das Abtippen ist reine (nervige, aber sinnvolle) Fleißarbeit. Nach einigen Jahren hat dann doch die Faulheit – oder Motivation? – gesiegt und es ist ein zusammengehacktes Script entstanden, das die beim Microchip Studio mitgelieferten Definitionsdateien in Codetemplates umwandelt.
Die Ausgabe sieht dann wahlweise so
... /// Module USART - USART /// Register group USART0 - USART /// Register UDR0 - USART I/O Data Register 0 UDR0 = ; /// Register UCSR0A - USART Control and Status Register A UCSR0A = (0<<RXC0) | (0<<TXC0) | (0<<UDRE0) | (0<<FE0) | (0<<DOR0) | (0<<UPE0) | (0<<U2X0) | (0<<MPCM0); /// Register UCSR0B - USART Control and Status Register B ...
oder so
...
/// Module USART - USART
/// Register group USART0 - USART
/// Register UDR0 - USART I/O Data Register 0
UDR0 =
/// Register UCSR0A - USART Control and Status Register A
UCSR0A =
(0<<RXC0) // USART Receive Complete
| (0<<TXC0) // USART Transmitt Complete
| (0<<UDRE0) // USART Data Register Empty
| (0<<FE0) // Framing Error
| (0<<DOR0) // Data overRun
| (0<<UPE0) // Parity Error
| (0<<U2X0) // Double the USART transmission speed
| (0<<MPCM0); // Multi-processor Communication Mode
...
aus.
Den Code und Details zur Benutzung gibt es im Git-Repository. Mal sehen, welche Tülchen in dem Dunstkreis sonst noch entstehen.