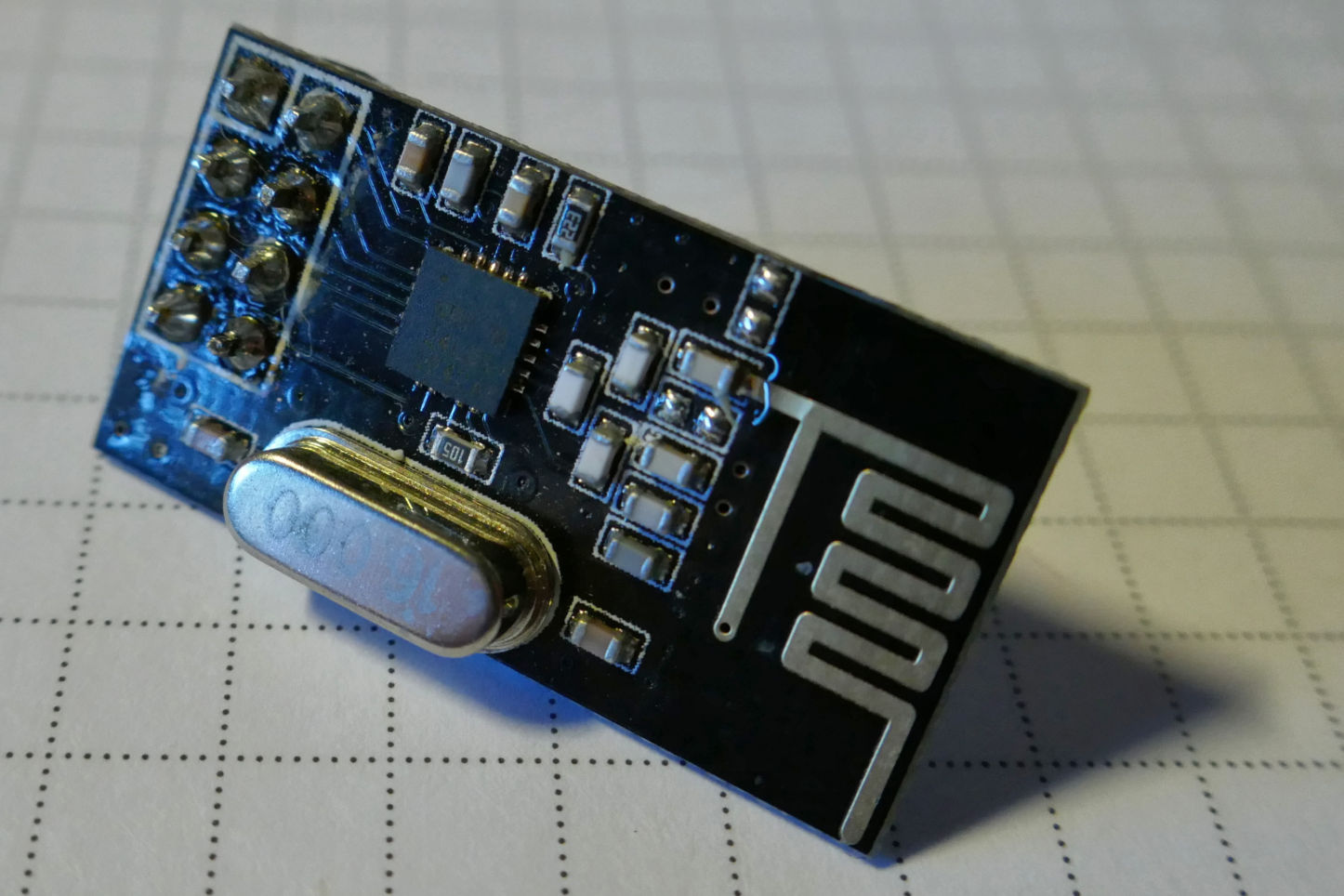
Die nRF24L01P sind beliebt und günstig, weshalb hier seit längerem auch ein paar Module mit den Chips herumliegen.

Getrieben durch das Vorhaben eine Wetterstation zu bauen habe ich zwei jeweils an einen Mikrocontroller gehängt.
Nachdem die Übertragung (endlich) funktionierte, ging es daran die Reichweite zu testen. Im ersten Einfach-Programm ließ ich im Sender jede Sekunde ein Paket mit Counter und den Werten des bereits angedengelten Luftfeuchte- und Temperatursensor senden.
Auf der Gegenseite lediglich eine LED, die bei jedem empfangenen Paket toggelt. Bei 1 Mbit/s und 0 dBm war schon im Treppenhaus schluss, ich hoffte aber noch, dass es im Garten noch bzw. wieder klappt, da quasi Sichtkontakt besteht. Nichts. Grmpf.
Laut Datenblatt gewinnt man mit 250 kbit/s gegenüber 1 Mbit/s 9 dB an Sensitivity, was ein wenig Quell der Hoffnung war. Leider hat das auch nicht so wirklich geklappt.
Um zumindest einen Erkenntnisgewinn zu haben, ging es in den Park nebenan um dort auszuloten, wie weit es überhaupt geht. Im ersten Versuch schaffte ich knapp 190 Meter im freien Feld und bei gut aufeinander ausgerichteten Antennen. Ohne Ausrichtung war bei etwa 70 Meter gerade noch zuverlässiger Empfang möglich.
Allerdings hatte ich keine Information, wie oft tatsächlich übertragen werden musste, um Daten von A nach B zu bekommen. Schließlich verwenden die Module Handshaking mit Retransmission. Eine Anzeige musste her. Also schnell das alte und zerkratzte Nokia-Display ausgegraben und angeschlossen. Der eingestaubte Code funktionierte auch fast auf Anhieb.
Da der Empfänger von sich aus nicht wissen kann, wie viele erfolglose Übertragungen es gab werden die Werte im Sender kumuliert in den Sendepuffer geschrieben und nach einer erfolgreichen Übertragung wieder zurückgesetzt. Auf dem Display sieht es dann wie folgt aus:

Ob es wirklich sinnvoll ist, die Temperatur und Luftfeuchtigkeit darzustellen, sei mal dahingestellt, aber warum wegwerfen, was der Sensor hergibt?
Neuer Tag, neues Glück? Mitnichten. Vielleicht lag es am Wetter, vielleicht an der Verdeckung durch Parkbesucher oder am Display – die Reichweite war niedriger. Zuverlässige Datenübertragung ohne Antennenausrichtung war bis knapp 55 Meter möglich, mit (und mit etwas Glück) etwa 85 Meter.
Die Verbindung zwischen geplanten Aufstellorten von Sender und Empfänger war nach wie vor nicht möglich.
Nächste Schritte? Am liebsten würde ich die nRF-Module verwenden. Die Software läuft und die Hardware ist schon da. Interessant wäre, wie sich die Antennen verbessern ließen. Ohne eine vernünftige Möglichkeit, die abgestrahlte Leistung oder das Stehwellenverhältnis zu messen wird es schwierig. Durch den Park laufen tut zwar gut ist aber nicht so richtig vergleichbar. Messequipment für solch einen Zweck zu kaufen steht in keiner Relation. Vielleicht muss ich mal mit ein paar bekannten HAMs reden.